360度PWM旋转编码器突破

360度PWM旋转编码器突破
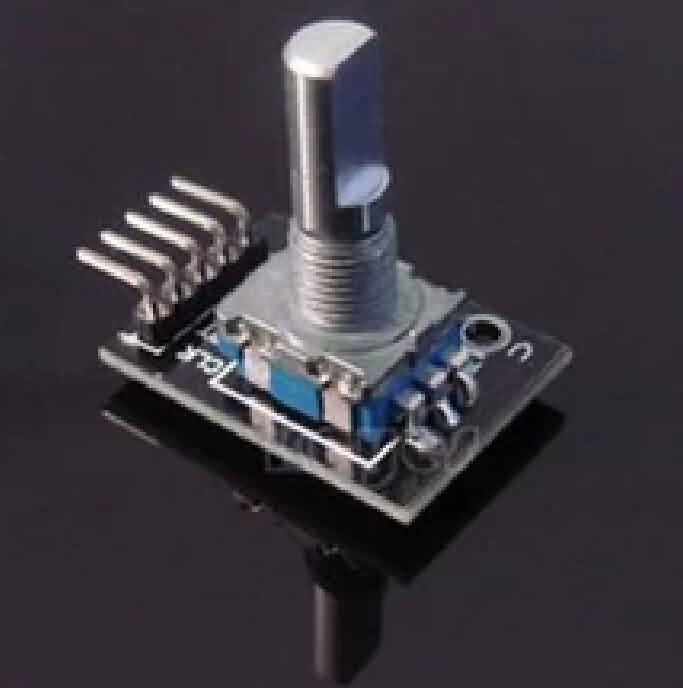
描述
这种类型的开关是增量旋转编码器。事实上,它是所有旋转编码器中最广泛使用的,因为它的低成本和提供可以轻松解释以提供相关信息(例如速度)的信号的能力。
通过旋转,旋转编码器可以在旋转过程中以正向和反向方向计数输出脉冲频率,这与旋转电位计计数器不同而不计算限制。使用旋转编码器上的按钮,它可以从零开始重置为初始状态。
测试代码
int redpin = 2;
int yellowpin = 3;
int greenpin = 4;
int apin = 6;
int bpin = 7;
int buttonpin = 5;
int状态= 0;
int longperiod = 5000; //绿色或红色的时间
int shortperiod = 700; //更改的时间段
int targetCount = shortperiod;
int count = 0;
void setup()
{
pinmode(apin,输入);
pinmode(bpin,输入);
pinmode(buttonpin,输入);
pinmode(redpin,输出);
pinmode(Yellowpin,输出);
pinmode(greenpin,输出);
}
void loop()
{
计数++;
if(DigitalRead(buttonpin))
{
Setlights(高,高,高);
}
别的
{
int change = getenCoderTurn();
int newperiod = longperiod +(更改 * 1000);
if(newperiod> = 1000 && newperiod <= 10000)
{
longperiod = newperiod;
}
if(count> targetCount)
{
setState();
计数= 0;
}
}
延迟(1);
}
int getencoderturn()
{
//返回-1、0或+1
静态Int Olda = low;
静态int oldb = low;
int结果= 0;
int newa = digitalread(apin);
int newb = digitalread(bpin);
if(newa!= olda || newb!= oldb)
{
//发生了变化
如果(olda ==低&& newa ==高)
{
结果= - (OldB * 2-1);
}
}
olda = newa;
oldb = newb;
返回结果;
}
int setState()
{
如果(状态== 0)
{
Setlights(高,低,低);
targetCount = longperiod;
状态= 1;
}
否则(状态== 1)
{
Setlights(高,高,低);
TargetCount = Shortperiod;
状态= 2;
}
否则(状态== 2)
{
Setlights(低,低,高);
targetCount = longperiod;
状态= 3;
}
否则(状态== 3)
{
Setlights(低,高,低);
TargetCount = Shortperiod;
状态= 0;
}
}
void setlights(int红色,int黄色,int绿色)
{
DigitalWrite(Redpin,Red);
DigitalWrite(黄金报,黄色);
DigitalWrite(Greenpin,Green);
}