该项目向您展示如何利用 TiVo 遥控器和 Arduino 板来操作线性执行器来举起覆盖电视的绘画。观看视频在最后
所需工具
完成该项目需要以下工具。
- #0 十字螺丝刀
- 烙铁
- 焊接
- 钢丝钳
- 小钳子(我使用专为操作小型电子产品而设计的钳子)
零件清单
完成该项目需要以下部分。
- 重型轨道执行器来自 Firgelli 自动化
- TiVo Roamio 遥控器
- Arduino Uno Rev 3
- Hammond 1591ESBK ABS 项目盒黑色 (7.5” x 4.3” x 2.2”)
- 适用于 Arduino 的 Microtivity IB171 170 点迷你面包板
- 红外接收器 2.5–5.5V 38kHz
- 100 件装 Michael Josh 20 厘米 M/F 跳线电缆 1 针插头公对母
- SainSmart 2 通道继电器模块
- USB 2.0 电缆 — A 公头至 B 公头
- 4 英尺 18/5 黑色喷淋线
- 8 颗 #4–40 x 2” 不锈钢机械螺丝(我从 Home Depot 购买)
- 8 数量 Everbuilt #4–40 机器螺丝螺母(我从 Home Depot 购买)
- 16 个 ½” 尼龙垫片(我从 Home Depot 购买)
- 1 条拉链领带
设置 Arduino Uno Rev 3
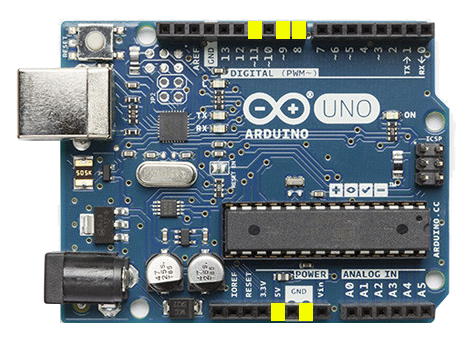
我们将使用 Arduino 板上以黄色突出显示的以下引脚。
- 电源5V
- 数字#8
- 数字#9
- 数字#11
- 电源地
设置SainSmart 2通道继电器模块
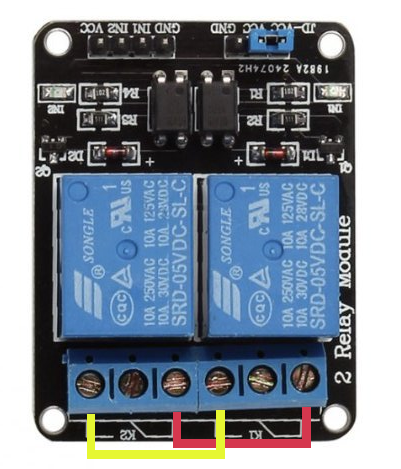
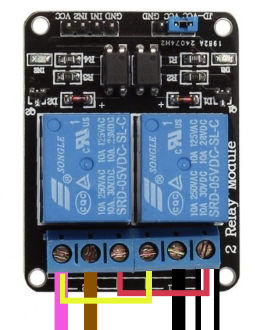
我们必须跳接 SainSmart 继电器模块,以便与 Firgelli 自动化线性执行器。 JD-VCC 到 VCC 有一根蓝色跳线。将其保留原样。
跳线 K1 位置 1 到 K2 位置 1
将跳线从 K1 继电器的第一个位置连接到 K2 继电器的第一个位置。我们的毛衣显示为红色。

跳线 K1 位置 3 到 K2 位置 3
将跳线从 K1 继电器的第三个位置连接到 K2 继电器的第三个位置。我们的毛衣显示为黄色。

正确跳转后,您应该看到以下配置。
设置红外传感器
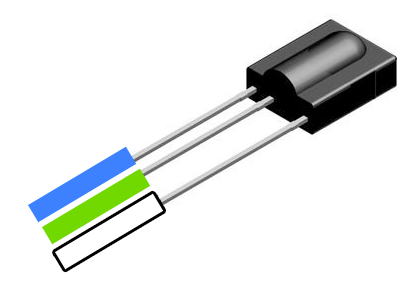
红外传感器有三根电线。一根用于接地线,一根用于 5V 电源线,第三根将信号发送到我们的 Arduino 板。
剥去 18-5 喷水器线上两英寸的外屏蔽层,露出内部的彩色电线。我们只会使用绿色、白色和蓝色电线,因此请剪掉其他电线,这样我们就不必弄乱它们。
剥去我们将使用的每根电线上⅛”的绝缘层。这些将使用以下配置焊接到继电器上。当圆形凸起面向您从顶部观察传感器时:
- 将蓝色电线焊接到左侧端子。
- 将绿线焊接到中间端子。
- 将白线焊接到右侧端子。
设置线性执行器的线束
线性执行器配有带有两个三角形按钮的有线遥控器。一个按钮激活一个开关,使线性致动器向上移动,另一个按钮将其向下移动。
拆下遥控器本体电路板
首先是拧下遥控器背面的电线。需要使用 #0 十字螺丝刀将其拆下。
从遥控器主体上拆下电路板并检查电线。从底部看,应该有四根电线焊接到板上。从左到右,它们是黑色、白色、紫色和棕色,如下所示。
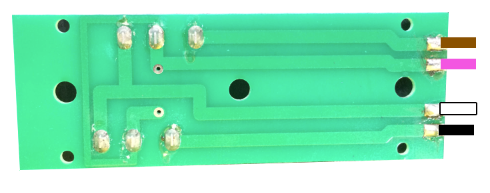
如果由于某种原因他们使用了不同的颜色,只需按照如下相同的顺序跟踪颜色即可。
拆焊电线
使用烙铁从电路板上拆下电线。轻轻地将烙铁头压在焊点上现有的焊料上,将其松开,然后使用一把小钳子轻轻地将电线从焊点上拉下来。
将电线连接到继电器
现在,我们将把有线遥控器的电线连接到 SainSmart 2 通道继电器。使用 #0 十字螺丝刀拧下端子,然后将其拧紧以固定电线。
- 白线将进入 K1 位置 1
- 黑线将进入 K1 位置 2
- 棕色线将进入 K2 位置 2
- 紫色线将进入 K2 位置 3
注意:请勿拆除现有的跳线。当您拧紧端子时,将它们留在里面。
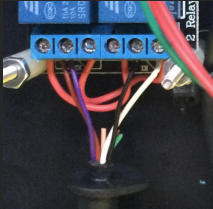
完成后,它应该看起来像上面的图片。
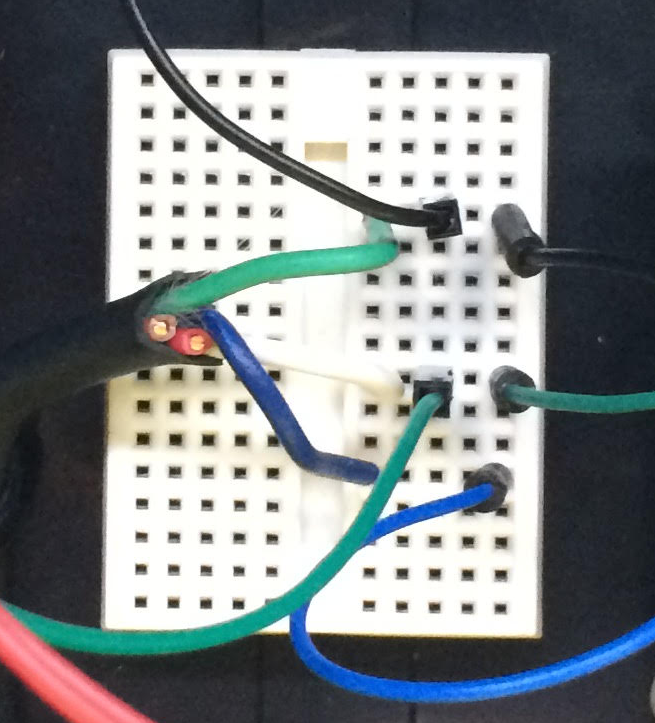
给面包板接线
现在我们将 Arduino 板连接到面包板。面包板允许我们在 Arduino 或继电器上的一个端子上进行多个连接的情况下进行跳线连接。
每排孔都连接在一起,使我们能够跳过该排上的所有内容。以下是我们需要连接的项目。
5V电源
- 使用公母跳线将 Arduino 上的电源 5V 端子连接到面包板上未使用的行。将其推入该行的孔中。
- 使用面包板上同一行的公母跳线连接到 SainSmart 2 通道继电器上的 VCC 端子。将其推入同一行的孔中。
- 从 18-5 洒水喷头线的另一侧露出 1/4 英寸的白线。将其推入同一行的孔中。
地面
- 使用公母跳线将 Arduino 上的电源 GND 端子连接到面包板上未使用的行。将其推入该行的孔中。
- 使用一根公母跳线从 SainSmart 2 通道继电器上的 GND 端子连接到与另一根 GND 线同一行的孔。将其推入同一行的孔中。
- 从 18-5 洒水喷头线的另一侧露出 1/4 英寸的绿线。将其推入同一行的孔中。
信令
- 使用公母跳线从 Arduino 上的数字 #11 端子连接到面包板上未使用的行。将其推入该行的孔中。
- 从 18-5 洒水喷头线的另一侧露出 1/4 英寸的蓝线。将其推入同一行的孔中。
完成后,面包板应如下图所示。
在Arduino上安装控制程序
您需要下载并安装 Arduino集成开发环境。下载并安装 IDE 后,打开 IDE。
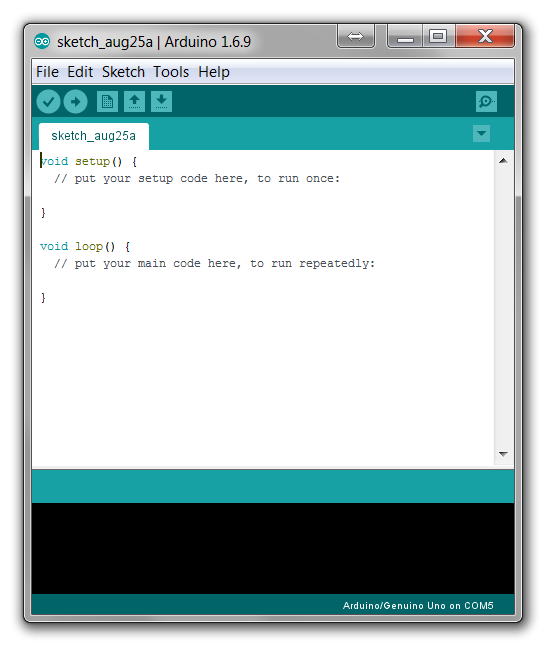
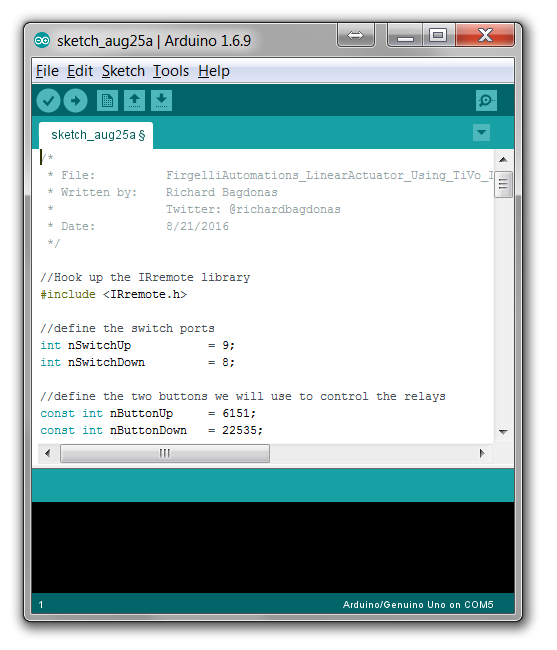
将代码复制并粘贴到 IDE 中
从以下位置下载或复制源代码 GitHub 并将其粘贴到 IDE 的窗口中,完成后应该如下所示。
调整IRremote.cpp文件
C:\Program Files (x86)\Arduino\libraries\RobotIRremote\src\ 目录中有一个文件存在源代码问题,导致 GitHub 源代码无法编译。在记事本等简单文本编辑器中打开 IRremoteTools.cpp 文件并更改以下行:
第 5 行应如下所示:
int RECV_PIN = TKD2; // IR接收器连接的引脚
将其更改为以下内容并保存文件。
int RECV_PIN = 11; // IR接收器连接的引脚
使用USB线将arduino连接到电脑
将 Arduino、面包板和继电器板放置在不导电的表面(例如木桌)上。
将 USB 电缆的矩形侧连接到计算机,将“D”侧连接到 Arduino 板。
选择端口
选择“工具”—“端口”菜单项,然后选择显示您的 Arduino 板的一项。
上传代码
选择 Sketch — Upload 菜单项将代码上传到 Arduino。
测试代码
代码上传后,将线束插入 Firgelli 自动化线性执行器装回执行器并插入执行器。
通过 USB 电缆将 Arduino 板插入计算机。
将 TiVo 遥控器对准红外传感器,然后单击“喜欢”按钮。执行器应向上移动。
将 TiVo 遥控器对准红外传感器,然后单击红色拇指“不喜欢”按钮。执行器应向下移动。
全部装箱
我使用哈蒙德项目盒以及机器螺钉、垫片和机器螺钉螺母来容纳我的电路板。我用烙铁上的尖端在黑色塑料盒上戳孔,并为穿过侧面的电线腾出空间。我用扎带防止红外传感器的电线被拉出。上的控制线 Firgelli 自动化线性执行器 有一块橡胶旨在防止它们被拉出,这样我就可以利用它。
关于作者
Richard Bagdonas 是一位数据集成专家,在销售点、电子健康记录、客户关系管理和仓库管理系统集成方面拥有超过 15 年的经验。 Richard 从小就开始摆弄电子产品,这是他的第一个 Arduino 项目。
Richard 目前是军情七处的首席医疗架构师,负责监督该公司与电子健康记录系统的集成。



