一个新的自动化项目可能会令人望而生畏;我们知道。考虑到所有的技术术语、电线、计算机控制接口和其他花哨的东西,甚至很难知道在哪里开始!当不确定性阻碍您的项目取得进展时,回到基础并审查项目需求可以为您指明前进的道路。我想说知识就是力量,但是理解 是货币。
当开始新的自动化项目,或在现有项目中重新安装和更换线性执行器时,这些问题将帮助您确定哪些执行器适合您的项目。
- 有什么应用?
- 您是否要将执行器放入现有的设计或产品中?
- 您正在从头开始设计一个新项目吗?
- 设备上的负载是多少,或者您需要多大的力?*
- 执行器额定重量适用于 仅轴向载荷。对于非线性应用(如铰链),您可能需要计算轴向载荷。
- 您需要多少行程(“行程”)?
- 所需的运动速度?
- 执行器 移动速度和力量等级成反比关系。您可能需要根据应用选择所需的速度或所需的力。
- 您需要多久运行一次?
- 我们计算 5 分钟的占空比 连续使用(在 运动);大多数非工业应用不需要考虑占空比。
- 其他条件?
- 诸如碰撞保护、减速或变速控制等功能可以包含在附加组件中。
- 有时可以通过继电器、控制方案和创造性接线来完成其他功能。
一旦理解了上述所有标准,您就可以从组件构建系统了。基本的执行器系统需要以下部件:
- 执行器 & 安装支架 - 支架是特定于执行器的。请参阅产品页面了解正确的支架
- 控制 (转变 或者 偏僻的 或者 可编程逻辑控制器)
- 系统的控制部分负责 切换极性 电机电路,它控制 执行器运动方向.
- 最多 限制、条件和要求 对于自动化系统来说,涉及控制方案。
- 与外部系统的接口 可以通过不同复杂程度的控制组件来完成。
- 能量源 -(超过执行器的累积安培数)
- 最简单的系统可能是 CSPS 有线电源和控制系统,加上 一 执行器(具有 5A 电流)。

接下来,是时候确定你的 最重要的要求。我们发现大多数项目都属于以下类别之一:垂直提升/降低、水平滑动运动、铰链驱动或基于精度的项目(例如,多于, 斯图尔特平台或科学测试设备)。我们不会在本文中讨论精度问题;如果您正在设计精密应用程序,我们建议从我们的开始 Arduino 控制执行器教程
垂直提升和水平滑动应用是最简单的规划 - 一切都是平行的,因此无需额外计算即可获得行程和重量评级 - 只需简单的加法和减法即可。
垂直升降机
其中最...之一 直截了当 应用是厨房电器升降机或下拉式升降机 - 这些项目很常见,因此我们为其制作了几乎一体化的执行器套件!厨房电器升降机是 仅有的 能够在垂直线上移动,并得到伸缩钢框架的大力支撑。
其中最...之一 广泛使用 Camper Van Bed Lift 是我们执行器的垂直提升应用。该操作是直接垂直运动,通常分布在 2-4 个执行器上,并且需要均匀、同步的运动。
上述两个项目都使用相同的原理,如下例所示。执行器以直线、简单、垂直的运动将物体移入或移开。唯一的 功能性的 项目之间的差异在于执行器相对于移动物体的位置 - 大多数病床升降机都有执行器 下 物体;大多数厨房电器升降机将位于下方 和后面,其他人甚至可能是 上方或邻近 移动的物体。在一些特定的应用中,可以使用滑轮。只要既不 执行器 也不 移动的物体 如果有阻碍,并且安装的连接牢固,则操作将正常进行。
对于这个例子,我们假设我们有一个 20” 透过窗 必须拉的 向上 并且不妨碍使用。窗户重 25 磅,包括窗框。窗户在轨道上。我们需要有 更多的 超过 25 磅的推/拉力,以及至少 20” 行程执行器。

此操作中的执行器可以以任一方向垂直安装。在上面的照片中,一个单元有杆 向上 和一个 向下。红点代表运动所需的支架或附件。该操作可以使用两个 同步的 平行安装的执行器,以确保窗户的运动均匀。这个操作可以 还 由窗户上方的单个执行器从中心拉动来完成 - 窗户需要足够好的平衡才能 不是 运行时绑定。如果这是一个问题,我们建议使用导轨滑轨、抽屉滑轨或其他线性导轨来确保无约束运动。
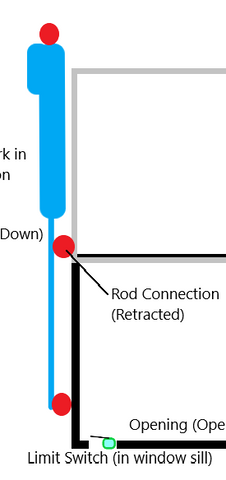
接下来是实际动作。这扇窗户高 20 英寸。用一个 高级线性执行器 对于这个例子;在撰写本文时,我们有 18 英寸行程选项和 24 英寸行程选项 - 我们应该选择哪一个?执行机构的行程为 最大运动量 你可以从单位得到。你可以 总是 使用外部限位开关进一步限制运动。对于我们的 20” 示例,18” 执行器 会留下2”的窗户 开口内。 24” 单元虽然更长,但可以限制为我们需要的 20”,而无需太多 额外的 考虑。我们不希望执行器在车窗关闭后完全驱动,因为这可能会损坏车窗、某人的手指、执行器或上述所有物体。我们建议使用外部限位开关在所需运动完成时停止操作。 点击这里 有关安装和接线的更多信息 外部限位开关。
在示例项目中,我们应该使用外部限位开关来停止执行器 关闭 或者 降低 位置。为此,我们将窗口的缩回(向上)位置与 完全缩回 执行器的位置;这使用了 回缩侧 执行器的内部限位开关限制运动 向上, 一旦车窗接触窗台,外部限位开关就会停止延伸(下降)。
我们应该采取 水平的 考虑到窗户的尺寸 接线, 但不会影响操作。
水平幻灯片
水平滑动操作的计算方式与垂直操作大致相同,但负载要求会发生变化。常见的水平操作包括滑出抽屉或楼梯、侧移隐藏电视或延伸平台(例如可展开的太阳能电池板)。

当自动化水平运动时,第一步是创建要自动化的运动。大多数项目都使用抽屉滑轨或导轨滑轨来实现此目的。在此应用中,幻灯片是 实际上 承受负载重量,因此选择合适的直线导轨或滑块至关重要。您需要首先安装线性滑动组件,并通过用手推动应用程序(如果可能)来确保运动正常。

我们已经确定该应用中的执行器确实 不是 推动物体的全部重量。相反,执行器只需要克服 摩擦 在线性导轨上 - 根据您所使用的,该值可能非常低。如果您无法通过自己移动物体获得近似的力估计,您可以根据移动物体的重量计算滑块的累积摩擦力/扭矩,然后确保执行器超过该值。最后一个选项是选择一个执行器 可以 垂直提升 物体,保证它将通过水平滑动运动来移动物体。
铰接翻盖或盖子
我们的第三种常见项目类型是铰链应用程序。我们实际上有一个 计算器 来帮助解决这个问题 - 但是 这篇文章不会 解决如何使用线性执行器计算器. (单击此处查看 LAC 教程文章).

如果从头开始,铰接应用程序需要一些三角学和简单的物理计算。与往常一样,第一步是定义运动并确保移动物体能够有效地围绕铰链进行铰接。

理想的应用允许执行器沿着其运动路径推动移动物体。该物体的运动路径是弧线,而不是直线 - 这意味着执行器的攻角 会改变 在操作过程中 - 这反过来意味着 瞬时所需力 也会通过操作而改变。在这些情况下,执行器相对于移动物体(盖子或挡板)的角度非常重要。安装位置会影响这个角度以及力;你可能已经意识到 这个应用程序 有 3个变量 一切都会改变并影响其他人的价值。这些变量是执行器行程长度、相对于铰链接头的物体安装位置以及所需的执行器力。 建议重点关注 首先是距离和行程,然后计算 重量要求 对于相应的位置。

当翻盖/物体“关闭”并且执行器缩回时,安装点应为缩回执行器的孔到孔长度,当翻盖/物体“打开”时,这些安装点应为缩回执行器的孔到孔长度。 延长执行器长度 分开 - 太长的笔划可能会被限制在正确的长度,但太短的笔划将无法完全移动对象。前面提到的计算器是 设计的 来帮助进行这些估计。 单击此处查看该教程。

如果安装点是 靠近铰链,该操作将需要 更大的力、更短的行程执行器。 如果您的安装点距离铰链较远,您将能够使用 较低的力 执行器带有一个 更长的行程长度。对于铰链项目,几乎有 总是一个范围 功能执行器的可能性,由您决定 哪一个选项 将最适合您的项目。
您可能已经意识到,我们正在平面上定义两个点,在部署时形成一个三角形 - 这是可用于从头开始计算笔划长度的三角学。这个推理也可以定义 两个可能的安装点,在这种情况下,任一位置都可以,但它们总是有 不同的负载值。下面是一个示例。
安装位置 1: 这个操作将会有一个 较低的负载重量,因为安装位置是 更接近垂直 当物体处于水平位置时,即存在 最大负载 在执行器上。这种设计的机械优势更高.

安装位置 2: 此布局需要一个 更高的力执行器;这是因为执行器是有角度的 向 铰链。这需要更多的力量来 开始移动 物体。




