Bảng điều khiển đồng bộ FA-SYNC-X
Các Firgelli Bảng điều khiển đồng bộ FA-SYNC-2 và FA-SYNC-4 tự động hóa cho phép bạn điều khiển tối đa 2 và 4 bộ truyền động tuyến tính tương ứng và đảm bảo chúng di chuyển theo từng bước và ở cùng tốc độ bất kể tải. Điều này cũng sẽ bảo vệ thiết kế của bạn vì chuyển động không đồng bộ có thể dẫn đến uốn cong và hư hỏng tải hoặc bộ truyền động. Điều này rất quan trọng trong các ứng dụng sử dụng nhiều bộ truyền động để di chuyển cùng một tải như với cửa sập, thang máy có mái che RV và mái che tonneau. Các bảng này yêu cầu bộ truyền động tuyến tính có phản hồi bên trong và tất cả các bộ truyền động tuyến tính phải cùng loại với cùng độ dài hành trình và lực. Việc sử dụng các bộ truyền động tuyến tính khác nhau sẽ không hiệu quả và bo mạch sẽ không thể đảm bảo chuyển động đồng bộ. Để biết danh sách các bộ truyền động tuyến tính tương thích và không tương thích, hãy xem Trang sản phẩm FA-SYNC-X.
Tại sao nên sử dụng bo mạch FA-SYNC-X với Arduino?
Sử dụng cả một Arduino và bo mạch FA-SYNC-X sẽ cho phép bạn tận dụng được lợi ích của cả hai bo mạch. Với Arduino, bạn sẽ có thể thực hiện tự động hóa tốt hơn nhiều so với việc sử dụng công tắc với bo mạch FA-SYNC-X. Mặc dù bạn có thể phát triển bộ điều khiển đồng bộ của riêng mình bằng Arduino, nhưng việc sử dụng bo mạch FA-SYNC-X sẽ làm giảm đáng kể độ phức tạp của mã Arduino và sẽ đảm bảo bộ truyền động tuyến tính của bạn di chuyển đồng thời. Việc sử dụng các bảng này cùng nhau là lý tưởng cho các ứng dụng mà bạn yêu cầu nhiều bộ truyền động tuyến tính di chuyển dựa trên đầu vào từ cảm biến hoặc dựa trên bộ hẹn giờ bên trong, chẳng hạn như định vị các tấm pin mặt trời để đạt được ánh sáng mặt trời tối đa.

Thiết lập & Hiệu chỉnh
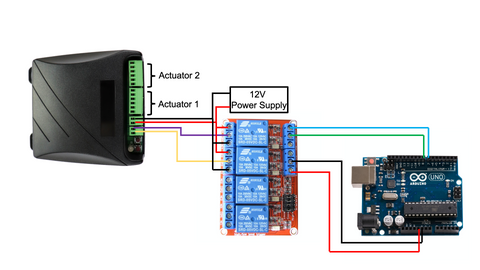
Thiết lập Bảng FA-SYNC-X được điều khiển bởi Arduino được thực hiện theo cách tương tự như trong các ứng dụng khác và bạn nên làm theo hướng dẫn sử dụng để các bảng này thực hiện điều đó một cách chính xác. Việc kết nối các bộ truyền động tuyến tính với bảng FA-SYNC-X vẫn được thực hiện bằng cách sử dụng 2 hoặc 4 khối đầu cực 6 chân và kết nối dây nguồn, nối đất, nguồn cảm biến, nối đất cảm biến, đầu ra cảm biến 1 và 2 dây đầu ra cảm biến của bộ truyền động tuyến tính đến thiết bị đầu cuối tương ứng trong khối thiết bị đầu cuối. Bạn cũng sẽ cấp nguồn cho bo mạch FA-SYNC-X tương tự bằng cách kết nối điện áp nguồn 12V hoặc 24V với nguồn điện trong khối đầu cực 2 chân, nằm ở bên trái của khối đầu cực 6 chân. Bạn phải đảm bảo rằng bạn kết nối các dây dẫn tích cực và tiêu cực của Nguồn cấp vào thiết bị đầu cuối đầu vào thích hợp vì nếu chúng bị lật thì sẽ gây hư hỏng vĩnh viễn cho bo mạch FA-SYNC-X. Để hiệu chỉnh bo mạch FA-SYNC-X, bạn vẫn phải làm theo quy trình tương tự như được mô tả trong hướng dẫn sử dụng của các bảng này.

Sau khi bo mạch FA-SYNC-X được kết nối và hiệu chỉnh, bạn có thể kết nối nó với bo mạch Arduino. Bạn vẫn sẽ điều khiển bảng FA-SYNC-X bằng khối đầu cuối điều khiển, khối đầu cuối 2 chân bên trái nhất, nhưng thay vì sử dụng công tắc hoặc điều khiển từ xa để điều khiển hướng của bộ truyền động tuyến tính, bạn sẽ sử dụng Arduino. Một vấn đề là Arduino sẽ không cung cấp điện áp đầu vào đủ cao để điều khiển các rơle bên trong của bo mạch FA-SYNC-X, nhưng chúng ta có thể sử dụng rơle bên ngoài để khắc phục vấn đề này. Giống như khi nào điều khiển bộ truyền động tuyến tính bằng Arduino, chúng ta có thể sử dụng 2 rơle SPDT để điều khiển bo mạch FA-SYNC-X. Chúng ta sẽ cần nối chân COM của từng rơle với một trong các chân của khối đầu cực điều khiển và nối chân thường mở (NO) của mỗi rơle với cực dương của nguồn điện và chân thường đóng (NC) của mỗi rơle theo hướng tiêu cực của nguồn cung. Bạn sẽ điều khiển cả hai rơle ngoài này bằng các chân kỹ thuật số của Arduino, như bên dưới. Trong trường hợp này, bạn cũng cần cấp nguồn cho bảng chuyển tiếp cũng sử dụng Arduino.
Điều khiển bo mạch FA-SYNC-X bằng Arduino
Sau khi Arduino và bo mạch FA-SYNC-X được kết nối cũng như bo mạch FA-SYNC-X được kết nối và hiệu chỉnh với bộ truyền động tuyến tính của bạn, bạn sẽ có thể điều khiển chúng bằng cách sử dụng đầu vào của Arduino. Mặc dù mã để Arduino đọc đầu vào từ cảm biến sẽ khác nhau tùy theo cảm biến bạn sử dụng trong ứng dụng của mình, nhưng mã để điều khiển bo mạch FA-SYNC-X sẽ tương tự. Mã để điều khiển bo mạch FA-SYNC-X sẽ rất giống với mã được sử dụng để điều khiển bộ truyền động tuyến tính với Arduino. Để mở rộng bộ truyền động tuyến tính, bạn sẽ cần kết nối chân A trên khối đầu cuối điều khiển của bo mạch FA-SYNC-X với điện áp dương, đồng thời kết nối chân B với đất. Để thực hiện điều này với Arduino, bạn chỉ cần cấp điện cho rơle phía dưới bằng cách kết nối đầu vào của rơle đó với đất (vì bảng rơle được sử dụng ở trên đang hoạt động ở mức thấp) và nó sẽ kết nối chân A với điện áp dương. Chân B sẽ được kết nối với mặt đất vì mỗi rơle được kết nối với mặt đất khi không được cấp điện theo thiết lập của chúng tôi. Để rút lại bộ truyền động tuyến tính, bạn sẽ làm theo các bước tương tự nhưng đối với chân B. Bạn sẽ cấp điện cho rơle trên cùng sẽ kết nối chân B với điện áp dương bằng cách nối chân điều khiển của rơle đó với đất. Để dừng bộ truyền động tuyến tính, bạn chỉ cần ngắt điện tất cả các cuộn dây và chân A và B sẽ được nối đất. Mẫu mã bên dưới hiển thị cách sử dụng mã để kéo dài, rút lại và dừng bộ truyền động tuyến tính như mô tả ở trên. Mã này không hiển thị cách triển khai các cảm biến đầu vào hoặc bộ hẹn giờ được sử dụng để kiểm soát thời điểm dừng và di chuyển bộ truyền động tuyến tính vì mã này sẽ thay đổi tùy theo cảm biến được sử dụng và ứng dụng.
Nhược điểm
Hạn chế lớn nhất của việc sử dụng bo mạch FA-SYNC-X với Arduino là bản thân Arduino sẽ không biết chính xác vị trí của bộ truyền động tuyến tính. Vì phản hồi được gửi đến bo mạch FA-SYNC-X không được chia sẻ với Arduino nên không có cách nào để biết chính xác bộ truyền động ở đâu. Điều này có thể hạn chế mức độ tự động hóa và kiểm soát mà bạn có đối với bộ truyền động tuyến tính vì bạn sẽ không thể định vị chúng dựa trên phản hồi, mặc dù đây không phải là vấn đề nếu bạn chỉ mở rộng và thu lại hoàn toàn bộ truyền động tuyến tính. Giải pháp đơn giản nhất để khắc phục điều này là ước tính khoảng cách mà bộ truyền động của bạn di chuyển trong một mili giây và sử dụng bộ đếm thời gian bên trong millis() của Arduino để ước tính vị trí dựa trên tổng thời gian bộ truyền động đang chạy, mặc dù điều này sẽ không cung cấp cho bạn vị trí chính xác . Nếu bạn yêu cầu vị trí chính xác, bạn có thể khắc phục vấn đề này bằng cách thêm yếu tố phản hồi bên ngoài vào thiết kế của mình, chẳng hạn nhưchiết áp tuyến tính bên ngoài, để cung cấp phản hồi cho Arduino.

Bản tóm tắt
Mặc dù có một số hạn chế khi sử dụng Bo mạch FA-SYNC-X với một Arduino, chúng có thể không phải là vấn đề trong thiết kế của bạn. Sử dụng các bảng này cùng nhau, bạn sẽ có thể đảm bảo chuyển động đồng thời của nhiều bộ truyền động tuyến tính bất kể tải với mức độ tự động hóa cao hơn. Việc sử dụng các bảng này kết hợp với nhau là lý tưởng cho các ứng dụng yêu cầu bạn sử dụng nhiều bộ truyền động tuyến tính để di chuyển một tải và bạn muốn tự động hóa việc di chuyển dựa trên bộ hẹn giờ hoặc đầu vào cảm biến.



