Панель управления синхронизацией FA - SYNC - X
Вот. Firgelli Автоматизированные панели управления синхронизацией FA - SYNC - 2 и FA - SYNC - 4 позволяют управлять до 2 и 4 линейными исполнительными устройствами, соответственно, и следить за тем, чтобы они двигались с одинаковой скоростью без учета нагрузки. Это также защитит ваш дизайн, поскольку несинхронизированное движение может привести к нагрузке или изгибу и повреждению привода. Это важно при использовании нескольких приводов для перемещения той же нагрузки, что и клапанные двери, лифты крыши RV и крыша кузова. Эти пластины требуют линейных приводов с внутренней обратной связью, и все линейные приводы должны быть одного типа с одинаковой длиной такта и силой. Использование различных линейных приводов не сработает, и плата не сможет обеспечить синхронизацию движения. Список совместимых и несовместимых линейных исполнительных устройств, пожалуйста, посмотрите Страницы продуктов FA - SYNC - X.
Зачем использовать FA - SYNC - X с Arduino?
Использование Ардуино Плата FA - SYNC - X даст вам преимущество в двух панелях. Использование Arduino, & Преобразование Использование платы FA - SYNC - X. Хотя вы можете использовать Arduino для разработки собственных контроллеров синхронизации, использование платы FA - SYNC - X значительно снизит сложность кода Arduino и обеспечит одновременное перемещение вашего линейного исполнителя. Использование этих панелей вместе идеально подходит для приложений, которые требуют нескольких линейных приводов, движущихся по входу датчика или на основе внутреннего таймера, таких как позиционирование солнечных панелей для получения максимального солнечного света.

Настройка и калибровка
Настройка Плата FA - SYNC - X Управление Arduino осуществляется таким же образом, как и другие приложения, и вы должны следовать Руководство пользователя Пусть эти советы делают это правильно. Подключение линейного привода к панели FA - SYNC - X по - прежнему осуществляется с использованием 2 или 4 6 - контактных плат и соединяет линии электропитания линейного привода, заземления, линии электропитания датчика, линии заземления датчика, выход 1 датчика и выход 2 датчика с соответствующими зажимами в монтажной панели. Вы также можете питать панель FA - SYNC - X, подключая напряжение питания (12 В или 24 В) к источнику питания в 2 - контактной панели слева от 6 - контактной платы. Вы должны убедиться, что соединение Электричество Потому что, если они будут перевернуты, это приведет к постоянному повреждению панели FA - SYNC - X. Чтобы откалибровать панель FA - SYNC - X, вы все равно будете следовать Руководство пользователя Эти советы директоров.

После подключения и калибровки платы FA - SYNC - X вы можете подключить ее к плате Arduino. Вы все еще можете управлять панелью FA - SYNC - X с помощью контрольной коммутационной платы (2 - контактной платы слева), но вы будете использовать Arduino, а не переключатель или пульт дистанционного управления для управления направлением линейного исполнительного устройства. Одна из проблем заключается в том, что Arduino не обеспечивает достаточно высокого входного напряжения для управления внутренними реле FA - SYNC - X, но мы можем использовать его Внешнее реле Чтобы преодолеть эту проблему. Как когда? Управление линейным приводом с помощью Arduino, мы можем использовать 2 реле SPDT для управления бортом FA-SYNC-X. Необходимо будет подключить COM-штырьку каждой реле к одной из штырьков блока управления и подключить обычно открытый (NO) штырьку каждой реле к положительной части блока питания и, как правило, закрывая (НК) штырьку каждой реле до отрицательного источника питания. Вы будете контролировать обе эти внешние реле с цифровыми штифтами Ардуино, как видно ниже. В этом случае необходимо также обеспечить питание ретранслятор используя также и Ардуино.
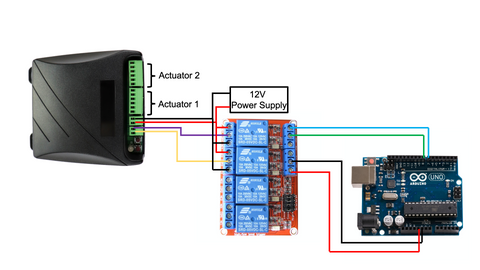
Управление FA-SYNC-X Board с Arduino
Как только Arduino и FA-SYNC-X board соединенные и FA-SYNC-X board соединен и откалиброван к вашим линейным актуаторам, вы сможете контролировать их использование входов в Arduino. В то время как код для Arduino для чтения входов от датчиков будет варьировать в зависимости от того, какие датчики вы используете в приложении, код для управления FA-SYNC-X board будет схожим. Код для управления бортом FA-SYNC-X будет очень похож на код, используемый для управления линейным приводом с Arduino. Для того чтобы расширить линейные приводы, необходимо подключить пин-код A к блоку управления FA-SYNC-X к положительному напряжению при подключении блока B к земле. Для этого с помощью Arduino вам просто нужно активизировать нижнюю ретрансляцию, подключив входные данные для этого реле на землю (в то время как ретранслятор, используемый выше, активен-низкий), и он подключит штык А к положительному напряжению. Pin B уже будет соединен с землей, так как каждая ретрансляция соединенна с землей, когда ее не заряжают под нашу установку. Для того чтобы вычесть линейные приводы, выполните те же действия, что и для Pin B. Вы будете заряжаете верхнюю реле, которая подключит штифт B к положительному напряжению, соединив контрольный штифт этого реле с землей. Чтобы остановить линейные актуаторы, вы просто дестимулируют все катушки, а пин А и Б будут соединенны с землей. В приведенном ниже примере кода показано использование кода для расширения, повторного использования и остановки линейных приводов, как описано выше. В коде не показано, как реализовать датчики ввода или таймеры, используемые для управления, когда остановить и переместить линейные приводы, так как он будет варьировать в зависимости от используемых датчиков и приложения.
Вниз
Самым большим недостатком использования платы FA-SYNC-X с Arduino является то, что сам Arduino не будет знать точную позицию линейного привода. Поскольку отзыв, отправленные в совет FA-SYNC-X, не используется совместно с Arduino, он не имеет возможности точно знать, где находится привод. Это может ограничить уровень автоматизации и контроля над вашими линейными факторами, так как вы не сможете позиционировать их на основе обратной связи, хотя это не проблема, если вы только полностью расширяете и втягиваете линейный привод. Простейшее решение заключается в том, чтобы оценить, насколько ваш привод перемещается за миллисекунду, и использовать millis () внутренний таймер Arduino для оценки положения на основе общего времени работы привода, хотя это не даст вам точного позиционирования. Если вам нужна точная позиция, вы можете преодолеть этот вопрос, добавив элемент внешнего отзыва в ваш дизайн, например,внешний линейный потенциометр, чтобы обеспечить обратную связь с Ардуино.

Резюме
Хотя есть некоторые недостатки использования Плата FA-SYNC-X с АрдуиноВозможно, они не являются проблемой в вашем дизайне. Используя эти советы, вы сможете обеспечить одновременное перемещение нескольких линейных приводов независимо от нагрузки с более высокой степенью автоматизации. Использование этих досок в сочетании друг с другом идеально подходит для приложений, требующих использования нескольких линейных приводов для перемещения одной нагрузки, и вы хотите автоматизировать перемещение на основе таймера или ввода датчика.



