O que é um Arduino?
Arduino é uma plataforma de prototipagem eletrônica de código aberto baseada em hardware e software flexíveis e fáceis de usar. Destina-se a projetos DIY, artistas, designers, amadores e qualquer pessoa interessada em criar projetos interativos. Arduinos são placas de microcontrolador que contêm tudo o que você precisa para interagir facilmente com o microcontrolador. Um microcontrolador é como um mini-computador para sistemas embarcados e o tipo de microcontrolador incluído dependerá do estilo do Arduino. Arduino varia entre os maiores Arduino Mega para o tamanho médio Arduino Uno para o menor Arduino Pro MiniAs placas de tamanhos diferentes fornecerão um número crescente de pinos de E/S e recursos adicionais e a mais popular dessas placas é a Uno. Arduino também fornece um código aberto livre para usar IDE para programar seus microcontroladores. O Arduino IDE usa uma linguagem de programação fácil de entender e, devido à popularidade do Arduino, você pode encontrar muitos exemplos úteis on-line para ajudá-lo a programar para sua aplicação específica. Se este é o seu primeiro projeto Arduino, o Kit Arduino irá fornecer-lhe tudo o que você precisa, desde cabos jumper a sensores a relés e inclui Arduino Uno para começar.

Por que usar um Arduino para controlar um atuador linear?
Uma das maiores vantagens de usar um Arduino, ou qualquer microcontrolador, para controlar um atuador linear é que você tem maior controle sobre seu atuador linear. Os microcontroladores permitem que você use entradas mais complexas de sensores ou outros dispositivos para controlar seu atuador linear. Eles permitem que você pré-forme cálculos em tempo real para posicionar seu atuador na posição ideal ou implemente temporizadores para automatizar mudanças de posição de seus atuadores. Os microcontroladores também podem receber feedback de seus atuadores para fornecer controle de posição e velocidade mais precisos, bem como controlar mais de um atuador ao mesmo tempo. Simplificando, os microcontroladores fornecem maior controle e flexibilidade e com o design fácil de usar e ampla popularidade do Arduino, o nível de complexidade adicional é mínimo.
Controlando um atuador linear com um Arduino
Você não será capaz de conectar diretamente seu atuador linear a um Arduino como você pode com um interruptor como a tensão de operação do Arduino é de apenas 5V e tem limites de corrente muito pequenos. Você precisará usar um componente intermediário para controlar o atuador linear, o que pode ser feito usando relés ou um driver do motor.
Relés
Como discutido aqui, relés são interruptores eletromagnéticos que são controlados energizando e desenergizando uma bobina para abrir e fechar o interruptor. O Arduino pode ser usado para controlar o relé energizando e desenergizando a bobina usando um pino I/O. Dependendo do tipo de relé que você usa mudará quanto controle você tem sobre seu atuador linear, mas a interface com o Arduino é bastante direta, basta energizar a bobina com um pino de E/S. Você precisará garantir que a tensão nominal da bobina esteja em torno da tensão operacional do Arduino (5V) ou o Arduino não será capaz de energizar a bobina o suficiente para fazer com que o interruptor feche.
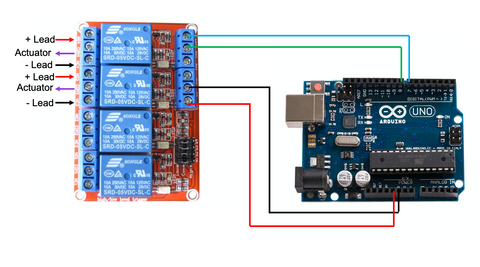
Acima está um exemplo de um Arduino interditado com uma configuração de retransmissão de dois SPDT. Nessa configuração, que é descrita aqui, os dois relés são usados para flip a polaridade da voltagem para o atuador linear, bem como desconectar a potência ao atuador. No exemplo de código é mostrado abaixo, o Arduino irá energizar o revezamento superior para estender o atuador por 2 seconds fixando o pino 7 para baixo, em seguida, parar o atuador por 2 seconds minutos, desenergizando a relargada superior, configurando ambos os pinos para alto. Para retrair o atuador, o Arduino irá energizar o segundo retransmissor para 2 seconds fixando o pino 8 para baixo, em seguida, pare o atuador por 2 seconds minutos colocando novamente todos os pinos para alto. Como este código está na seção de loop do programa, o Arduino continuará repetindo esse código repetidas e over. Obviamente, você poderia implementar uma solução de codificação mais elegante para a sua aplicação, mas se você está procurando por ainda mais controle, você vai querer usar um driver de motor.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
Driver de Motor
A condutor do motor é um design de circuito integrado especificamente para controlar os motores DC, que conduzem atuadores lineares DC. Os condutores de motor comumente fazem uso de uma ponte H para permitir o controle de direção e velocidade. Como conectar exatamente o seu Arduino ao seu motor a motor vai depender do driver exato do motor mas necessitará de pelo menos dois pinos de E/S para isso e um deles será um sinal PWM. PWM ou modulação de largura de pulso é um método de variação de um sinal entre os valores de on e off para fornecer efetivamente uma voltagem inferior à de operação. O condutor do motor pode então utilizar este sinal para ajustar a velocidade em que o motor roda.
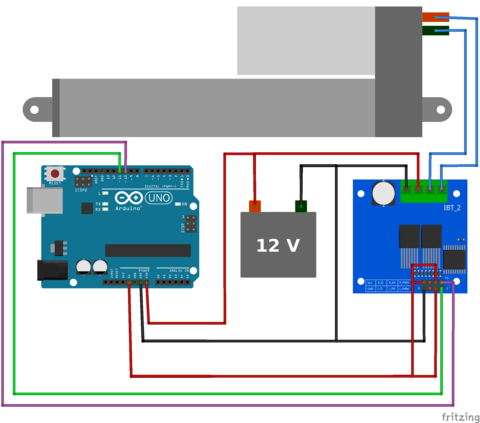
Acima é um exemplo do nosso High Current DC Motor Drive interditado com um Arduino. Para este driver de motor, é necessário enviar dois sinais PWM, um para estender o atuador e o outro para retração. O PWM é dado como um significado de byte não assinado que varia de 0, sem tensão, a 255, a tensão máx (5V), que será proporcional à velocidade do motor. Como o PWM não é um valor binário, precisamos utilizar os pinos do PWM do Arduino e utilizar a função de gravação analógica, como visto no exemplo abaixo. Pinos PWM serão indicados no Arduino com um ~ ou simplesmente rotulados como pinos PWM.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
No código exemplo acima, o Arduino estenderá o atuador a toda velocidade por dois segundos enviando o driver do motor o 5V completo fora do pino 10 para o pino LPWM no driver do motor. Em seguida, o Arduino pára o atuador ao não enviar qualquer sinal para nenhum pino de entrada do driver do motor. O Arduino, então, retraia o atuador à meia velocidade enviando o sinal do condutor do motor que é a metade em e metade de desconto do pino 11 para o pino RPWM no motor do motor. Em seguida, pára o atuador novamente. Como este código está na seção de loop do programa, o Arduino continuará repetindo esse código repetidas e over. Mais uma vez, você poderia implementar uma solução de codificação mais elegante que se adequa ao seu aplicativo, especialmente se você adicionar insumos para controlar seu atuador.
Incluindo Entradas
Uma vez que você pode controlar o seu atuador com um Arduino, você pode então implementar entradas para o Arduino para maior automação e controle. Essas entradas podem ser interruptores, uma ampla gama de sensores, ou até mesmo feedback do próprio atuador. Como existe uma ampla gama de opções de insumos, como implementá-los vai variar mas há alguns pontos gerais que você deve conhecer. Se a entrada fornecer uma entrada binária, como um switch, você vai querer fazer uso dos pinos digitais no Arduino, que serão rotulados no quadro ou no datasheet, e fazer uso da função digitalRead () na IDE do Arduino. Se o seu dispositivo de entrada fornece um sinal analógico, você precisará fazer uso dos pinos analógicos, que serão rotulados no quadro ou no datasheet, e fazer uso da função AnalogRead ().



